团队负责人:
夏鲲 金沙威尼斯欢乐娱人城光电学院电气工程系系主任,中国电工技术学会小功率电机专委会委员(2017-)、自动化及计算机应用专委会委员(2015-)。作为主要作者发表各类学术论文60余篇,曾作为负责人主持各类课题30余项,承担国家自然科学基金青年项目1项,和企业共同承担宁波市十二五重大科技攻关项目1项。2016年获宁波市科技进步三等奖,2017年获浙江省科技进步三等奖。团队主要成员毕超教授,发表论文120余篇、专著一部,IEEE高级会员,蒋全教授, IEEE Magnetics Society技术委员会委员,IEEE Magnetics Society Singapore Chapter主席(2015/2016) ,发表论文100余篇。两人均为国际知名的电机行业专家,曾因低噪声磁盘主轴电机的研究工作共同获得2006年度新加坡年度唯一的最高科技奖(National Technology Award)。
现代电力电子技术科研团队以电气工程专业为学科背景,聚焦智能电网的用户侧技术创新,以现代电力电子技术、电机控制技术、电机的精密光电测试技术、新能源并网技术等为主要研究方向。
团队成员 | |
姓名 | 研究方向 |
夏鲲 | 电力电子、电机控制 |
毕超 | 电机设计、电机测试 |
蒋全 | 电机设计、电机控制 |
李孜 | 脉冲功率技术 |
袁庆庆 | 电力电子 |
饶俊峰 | 脉冲功率技术 |
姜松 | 脉冲功率技术 |
王楠 | 电力电子 |
李正 | 电机控制 |
代表性成果:基于人工智能算法的电弧放电检测系统
成果简介:
在串联回路中,当电弧或放电现象发生时,对电流进行频谱分析,根据电流的频谱特征变化来确定是否有电弧发生,提供预警信息或保护动作。为了防止在开关的瞬间或受到其他脉冲电流的干扰造成电弧故障检测电路误动作,同时在频谱分析的基础上综合电弧时间长短等其他特性作为电弧故障的判据。系统的硬件部分包含电流检测、滤波、故障特征提取等模块。软件部分包含信号采集、信号处理、故障判别等模块,并综合时间等其他因素降低误报率,提高检测系统的可靠性。在算法中,采用了人工智能算法以提高系统的适应性。
主要成果包括:
1、对故障电弧/放电现象的故障特征识别和提取。
2、人工智能算法在应用案例中的实现。
3、成功应用于光伏逆变器新能源行业,正在应用于汽车、高压双馈风机行业。
成果的技术指标:
光伏逆变器系统串联电弧故障检出率大于99.9999%。
技术的成熟度:
掌握核心人工智能算法,完成功能样机。已与两家世界500强企业展开依托该技术的项目合作,计划将该技术应用于未来的工业产品中。
成果的图片:

图1. 基于人工智能算法的电弧放电检测系统
代表性成果:楼宇自动化现场总线控制系统
成果简介:
采用采用工业控制机+PLC控制实现楼宇自动化现场总线控制系统。其中上位机与各分节点通讯,对各楼层所有被控对象、监测对象在中控室进行集中监测、显示、控制。BA控制室一名员工根据业主需求,可同时监测、控制各层的被控对象,使其正常运转。B3楼层与中控室通讯,对B3层的热水泵启停进行控制、对集水井水位、污水处理站水位进行监测报警。员工无需频繁地对B3层进行巡检,可对水泵进行手动/自动控制。1-5及顶层与中控室通讯,监测送风、回风温度,对送风温度除进行中控室集中控制外,可进行现场显示、设定。对电磁阀开关、开度进行监测、显示、控制。控制、监测变风量空调机的启停。监测送风、回风压力,对滤网状态进行三阶段报警。现场手动控制最高级优先权授予。在中控室根据上位机的设定进行空调集中显示、控制,员工无需频繁地往返于各层空调间,根据业主的要求进行空调操作,减少由于业主体感的滞后性带来的繁复工作。现场同时具有显示、手动控制功能。对整幢大楼的照明进行集中控制。
主要成果包括:
1、使用工业现场总线完成楼宇自动化控制系统。
2、控制对象丰富,包括风机、泵、集水井、照明等。
3、控制手段齐全,可手动/自动自由切换,可在现场和中央控制室进行现场和集中控制,可根据需要预设自动工作时间。
4、安全无故障运行时间长。
成果的技术指标:
被控对象为热水泵3台,空调11台,顶层水箱,底层集水井,照明系统。控制内容包括热水泵启停,变风量空调机启停,空调送风温度设置,电磁阀开度(4档),手动/自动切换,现场LCD显示;检测内容包括热水泵状态,集水井水位,污水处理站水位,变风量空调机状态,送风温度,回风温度,送风风压,回风风压,风阀开度(4档)。
技术的成熟度:
该系统自2012年夏于汤臣金融大厦正式运行以来,实现了对新风系统、照明系统等的集中自动化控制,至今五年多时间,安全无故障运行。得到汤臣集团和楼宇业主的广泛好评。
成果的图片:

图1. BA控制系统PC端界面 图2. 现场控制节点
代表性成果:无人机720°VR全景影像系统
成果简介:
本成果提供了一种可提供720°VR全景视频影像拍摄的无人机机载观察装置,并确保其拍摄、观察画面的稳定性。本成果将无人机机载观察更有效地运用到实际系统中,如空中720°VR影像拍摄、三维立体建模、城市规划、光伏设备巡检等,大幅提升拍摄画面的视野范围,提高所拍摄影像的画质及稳定性。虚拟现实(VR)全景成像技术目前广泛应用于街景地图制作、城市规划、影视制作等领域,但空中VR成像及观察技术目前仍存在较大的技术缺陷,在实际应用中存在不足。首先,空中拍摄时,由于无人机机体或旋翼遮挡,并不能做到真正意义的全景,遮挡部分一般采用后期制作贴图的方式补足;其次,无人机飞行过程中,是否运行到指定空间位置,是否有碰撞的危险,只能通过操纵人员在地面的目测,不能确保拍摄过程中的完全准确和安全;最后,飞行过程中机体震动对拍摄画面质量造成严重影响,未对全景相机进行增稳的拍摄画面抖动明显,不能有效合成稳定的全景影像。720°VR全景影像技术是一种三维虚拟显示技术,运用多角度相机拍摄之后,再在图像处理系统中进行后期缝合,从而产生水平360°×垂直360°的立体影像,能够让体验者与周围环境互动,使之获得身临其境的感觉。
主要成果包括:
1、提出了720°VR全景航拍整体设计架构。不同于目前市面上多旋翼无人机普遍采用的航拍系统云台结构,本成果合理优化了无人机机体结构。该云台能够在机体上下同时挂载用于VR航拍的全景相机阵列,并对所搭载相机进行电子机械增稳。通过对机体上下VR全景相机阵列的合理排布,实现了在720°视野范围内不受任何机体遮挡的全景画面拍摄。图1所示为720°VR全景航拍系统整体实物图。
2、完成了720°VR全景增稳云台技术突破。在增稳云台中融入了云台驱动电机冗余设计的理念,云台俯仰轴、横滚轴均采用共轴双无刷直流电机驱动模式,采用五电机驱动三轴云台增稳。图2所示为云台驱动电机冗余设计示意图。
3、提出了空中VR全景影像直播技术途径。本成果通过无人机机载端搭载基于FPGA处理器的图像实时合成单元,使用光流算法对多路同步采集影像进行拼接合成,实现了机载端符合H.264技术标准的4K全景影像输出,通过高清数模图传设备实现了1km范围内低于50ms延时的空中全景影像直播。
成果的技术指标:
适用于空中安防、军事侦察、VR影视制作、地图街景拍摄等领域;720°VR全景增稳云台有效最大相机负载4kg,修正精度为±0.05°;无人机系统整体起飞重量12kg,单次飞行最大续航时间30min;VR全景影像采用4K(3840×1920)画质实时合成直播影像信号输出,经过后期拼接处理可得到8K(7680×3840)画质全景影像。
技术的成熟度:
该成果目前已完成中试,与多家企业签订合作意向。
成果的图片:

图1. 720°VR全景航拍系统整体实物图 图2. 720°VR全景增稳云台结构图

图3. 全景成像效果
代表性成果:汽车密封圈智能检测系统
成果简介:
汽车上使用的密封圈有数百个,这些密封圈被运用在发动机及附件系统、传动系统、转向系统、制动系统等,以及油泵、水泵、单向阀、截止阀等小系统,起到隔绝汽车内部液体和气体,并防止外界雨水和灰尘的进入作用。所以密封圈的质量直接影响汽车性能及行驶安全。
目前国内密封圈生产企业普遍采用人工检测,效率低且人为因素大。本项目采用工业智能相机,通过图像识别对密封圈弹簧的安装位置(包括漏装、多装和装偏等)、弹簧自身缺陷(搭扣损坏、锈斑及变形等)和密封圈橡胶飞边进行检测,从而替代人工检测,提高检测效率和准确性,消除人工检测的不确定性。
主要成果包括:
1、密封圈残次品特征抓取。针对密封圈弹簧的安装位置(包括漏装、多装和装偏等)、弹簧自身缺陷(搭扣损坏、锈斑、节距不均匀及变形等)和密封圈橡胶飞边等样本进行分析,并通过图像灰度提取、边缘检测、面积过滤、相对定位、数学形态等多种软件处理方法,从而完成残次品特征的抓取和判断。
2、智能相机位置。选用两个摄像头全方位抓取检测对象的图像,采用两级检测和判断,两级检测对部分特征要求进行重叠检测,以提高出检率。
3、电气控制及实时显示。在获得检测结果的基础上,与PLC控制器进行通信,将检测结果传送给PLC,由PLC控制机械手对密封圈进行分类剔除作业,实现检测系统的操作自动化,并实时显示残次品的数量及类别。
4、机械传动及分类自动化。机械结构和原弹簧安装机械无缝接轨,节拍协调,实时分拣归类合格品和次品,大大提高系统的检测准确性和效率。
成果的技术指标:
1、适用于大部分汽车密封圈检测;
2、检出率高(漏检率低于千分之一),灵敏度及稳定性好;
3、取代人工检测,实现低成本高可靠性;
技术的成熟度:
该设备投入运行超过3年,受到了用户好评。
成果图片:
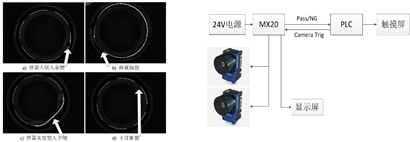
图1. 部分检测对象样本 图2. 系统原理图

图3. 实时检测

图4. 成品装置
代表性成果:高压输电线路巡检机器人
成果简介:
高压输电线路故障而引发停电,给人民生活、工业企业和国家造成了巨大的经济损失。需要及时发现输电线路的隐患和缺陷,并进行修复,防患于未然,必须对输电线进行定期的巡检。机器人是一种近距离巡检线路和修复缺陷的工具。巡检机器人以高压输电线路的地线为作业路径,通过利用各种传感器的信息,获得外部环境信息,实现自我定位,判定自身状态,按照运动轨迹规划产生系列运动,完成巡检任务。
主要成果包括:
1、巡检机器人的机电系统。巡检机器人的机械系统由双臂、轮爪、导轨和控制箱组成。电气系统由PC104 控制中心、电机、伺服驱动器、传感器、电源、地面站等组成。
2、巡检机器人的运动控制系统。巡检机器人完成上塔、行驶、爬坡、翻越防振锤、翻越悬垂线夹、翻越耐张塔、下塔等一系列的动作过程,机器人按照运动轨迹规划进行作业。
3、巡检机器人的线路缺陷检测系统。巡检机器人的线路缺陷检测系统由雷达、可见光摄像机、红外摄像机,云台等组成。
成果的技术指标:
巡检机器人的长 | 1.2m~2m | 通讯 | (700M/4G/5G) |
巡检机器人的宽 | 0.28~0.5m | 行驶速度 | 11Km/h |
巡检机器人的高 | 0.6m~1m | 续航时间 | 9h |
巡检机器人的重量 | 60Kg | 适用电压等级 | 交流110/220/500/750/1000KV |
技术的成熟度:
巡检机器人完成样机试制,完成500KV输电线的巡检实验,逐步推广中。
成果的图片:

图1. 在500KV输电线的地线上行驶 图2. 在500KV输电线的地线上进行翻越铁塔
代表性成果:幅值、频率、脉宽可调的全固态脉冲电源
成果简介:
围绕功率半导体技术的发展,以体积小、重频高、易触发、可控性强、寿命长、可靠性高等优点,逐渐取代气体开关而成为了脉冲功率源中的主导开关,脉冲功率发生器全固态化也成为脉冲功率技术的研究热点和发展趋势。由于高功率快脉冲源高幅值、快速上升沿下降沿,其在工业应用、环保和医疗领域中的应用也越来越广泛。基于半导体开关的全固态脉冲电压倍增技术,及其多种拓扑的实现方案,可以轻松实现单极性和双极性的方波高压脉冲;同时,利用半导体开关的移相控制技术和截尾技术,可实现快速下降沿和脉宽可调节的方波脉冲。
主要成果包括:
1、负高压32kV电压输出的单极性全固态Marx电源。
2、输出电压20kV、电流200A的单极性脉冲叠加器。
3、一台双极性全桥型脉冲叠加器,成功输出±5kV、最小脉宽60ns 的双极性窄脉冲和任意可调的阶梯波。
4、在介质阻挡负载下输出幅值30kV、频率20kHz、脉宽6us、前后沿小于250ns方波脉冲。
5、在阻性负载下输出±5kV、频率1kHz、最小脉宽60ns、前后沿40ns的高压双极性窄脉冲。
成果的技术指标:
可以实现幅值0-30kV,最小脉宽60ns,频率0-20kHz可调节的高压脉冲电源。
技术的成熟度:
2008年展开全固态脉冲电源的研制,分别在粒子加速、空气净化、水处理、汽车尾气处理、材料表面改性等方面得到相关应用。
成果的图片:

图1. 单极性脉冲电源拓扑结构 图2. 双极性脉冲电源拓扑结构
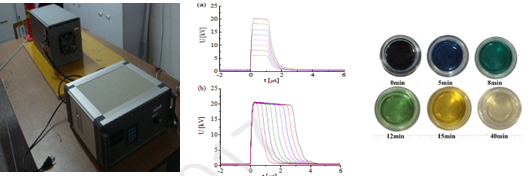
图3. 单极性实物图 图4. 幅值脉宽可调波形图 图5. 用于水处理的实际效果图
